簡單測試了一下真的是蠻方便使用的, 唯一美中不足的大概就是沒有把RESET Pin拉出來吧.











#include "Button.h"
uint16_t DebounceKeyCnt = 0;
uint8_t KeyValue = 0;
uint8_t KeyState = 0;
void Button_Init(void)
{
nrf_gpio_pin_dir_set(Button_GPIO_Pin,NRF_GPIO_PIN_DIR_INPUT); //configurate pin direction to input
nrf_gpio_cfg_input(Button_GPIO_Pin, NRF_GPIO_PIN_PULLUP); //pull-up
}
uint8_t KeyScan(void)
{
KeyValue = nrf_gpio_pin_read(Button_GPIO_Pin);
#ifdef high_active
KeyValue = KeyValue; //active high
#endif
#ifdef low_active
KeyValue = !(KeyValue); //active low
#endif
if(KeyValue >= 1)
{
DebounceKeyCnt++;
if(DebounceKeyCnt >= 5)
{
DebounceKeyCnt = 0;
KeyState = 1;
}
}
else
{
DebounceKeyCnt = 0;
KeyState = 0;
}
return(KeyState);
}
#include "nrf_drv_gpiote.h"
#define Button_GPIO_Pin 25
#if 0
#define high_active
#else
#define low_active
#endif
void Button_Init(void);
uint8_t KeyScan(void);
void Timer_Init(int32_t deltatime)
{
NRF_TIMER2->BITMODE = TIMER_BITMODE_BITMODE_16Bit; //Set counter to 16 bit resolution
NRF_TIMER2->MODE = TIMER_MODE_MODE_Timer;
NRF_TIMER2->PRESCALER = 9; //16MHz/(2^9) = 16MHz/512 = 31250Hz = 32usec
NRF_TIMER2->CC[2] = (deltatime/32); //250 = 8msec , 500 = 16msec
NRF_TIMER2->INTENSET = TIMER_INTENSET_COMPARE2_Enabled << TIMER_INTENSET_COMPARE2_Pos;
NRF_TIMER2->SHORTS = (TIMER_SHORTS_COMPARE1_CLEAR_Enabled << TIMER_SHORTS_COMPARE1_CLEAR_Pos);
NVIC_ClearPendingIRQ(TIMER2_IRQn);
NVIC_SetPriority(TIMER2_IRQn,3);
NVIC_EnableIRQ(TIMER2_IRQn);
NRF_TIMER2->TASKS_START = 1;
}
void TIMER2_IRQHandler(void)
{
if((NRF_TIMER2->EVENTS_COMPARE[2] == 1) && (NRF_TIMER2->INTENSET & TIMER_INTENSET_COMPARE2_Msk))
{
NRF_TIMER2->EVENTS_COMPARE[2] = 0;
//nrf_gpio_pin_toggle(20); //debug gpio
NRF_TIMER2->TASKS_CLEAR = 1;
}
}
3. 假設需要定義一個固定每10msec會觸發的Timer, 可以在Init的時候帶入這樣的參數.
Timer_Init(10000);
#include "i2c.h"
void I2C_Master_Init(void)
{
twi_master_init();
}
int I2C_Write(uint8_t DeviceAddr, uint8_t RegAddr, uint8_t* pBuffer, uint16_t NumByteToWrite)
{
#define i2c_write_data_len 6
uint8_t w2_data[i2c_write_data_len+1], i;
w2_data[0] = RegAddr;
for ( i = 0 ; i < NumByteToWrite ; i++ ) {
w2_data[i +1] = pBuffer[i];
}
if(twi_master_transfer(DeviceAddr,w2_data,NumByteToWrite+1,TWI_ISSUE_STOP) == false)
return -1;
return 0;
}
int I2C_Read(uint8_t DeviceAddr, uint8_t RegAddr, uint8_t* pBuffer, uint16_t NumByteToRead)
{
if(twi_master_transfer(DeviceAddr, &RegAddr, 1, TWI_DONT_ISSUE_STOP) == false)
return -1;
if(twi_master_transfer(DeviceAddr|TWI_READ_BIT, pBuffer, NumByteToRead, TWI_ISSUE_STOP) == false)
return -1;
return 0;
}
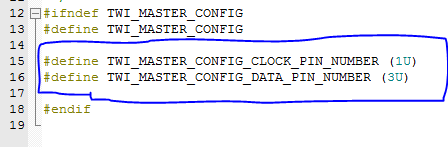
#include "twi_master.h" void I2C_Master_Init(void); int I2C_Write(uint8_t DeviceAddr, uint8_t RegAddr, uint8_t* pBuffer, uint16_t NumByteToWrite); int I2C_Read(uint8_t DeviceAddr, uint8_t RegAddr, uint8_t* pBuffer, uint16_t NumByteToRead);